
Development of Mini Drone
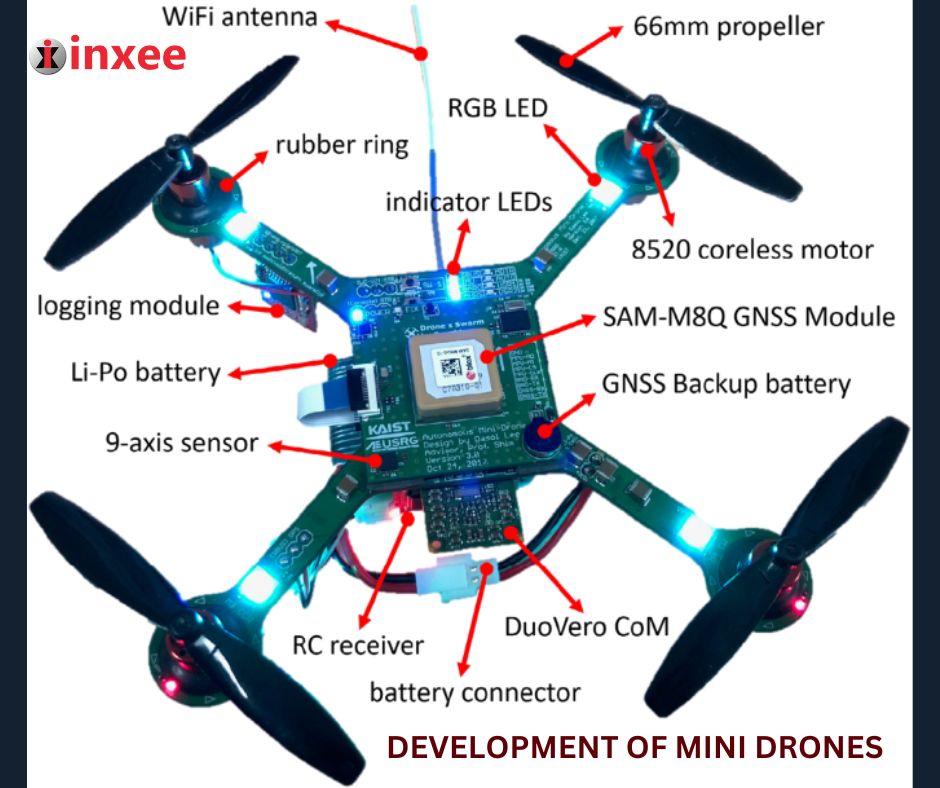
The developed mini-drone has a compact size, with a wheelbase of 130 mm and mass of 76 g, including all the sensors necessary for autonomous flight in an outdoor environment. In addition, the mini-drone can successfully complete a complex multi-agent flight mission via the integrated Linux computer and wireless network system that allows real-time feedback. The control system of the mini-drone is designed as based on the dynamics established by the system identification process, which is developed as based on actual flight data; in addition, a complementary filter is adopted for the navigation algorithm to reduce computational cost, which is essential to increasing the update rate.
The proposed GVF algorithm utilizes a vector field algorithm to generate the path to track the given target while also avoiding collisions with other agents and obstacles. Moreover, because the GVF algorithm optimally allocates the targets to each agent using a modified genetic algorithm, the proposed algorithm can generate optimal paths for multiple agents. This algorithm has been implemented in the integrated Linux computer of the mini-drone, and the feasibility has been verified by carrying out several flight tests in actual outdoor environments.






Leave a Reply